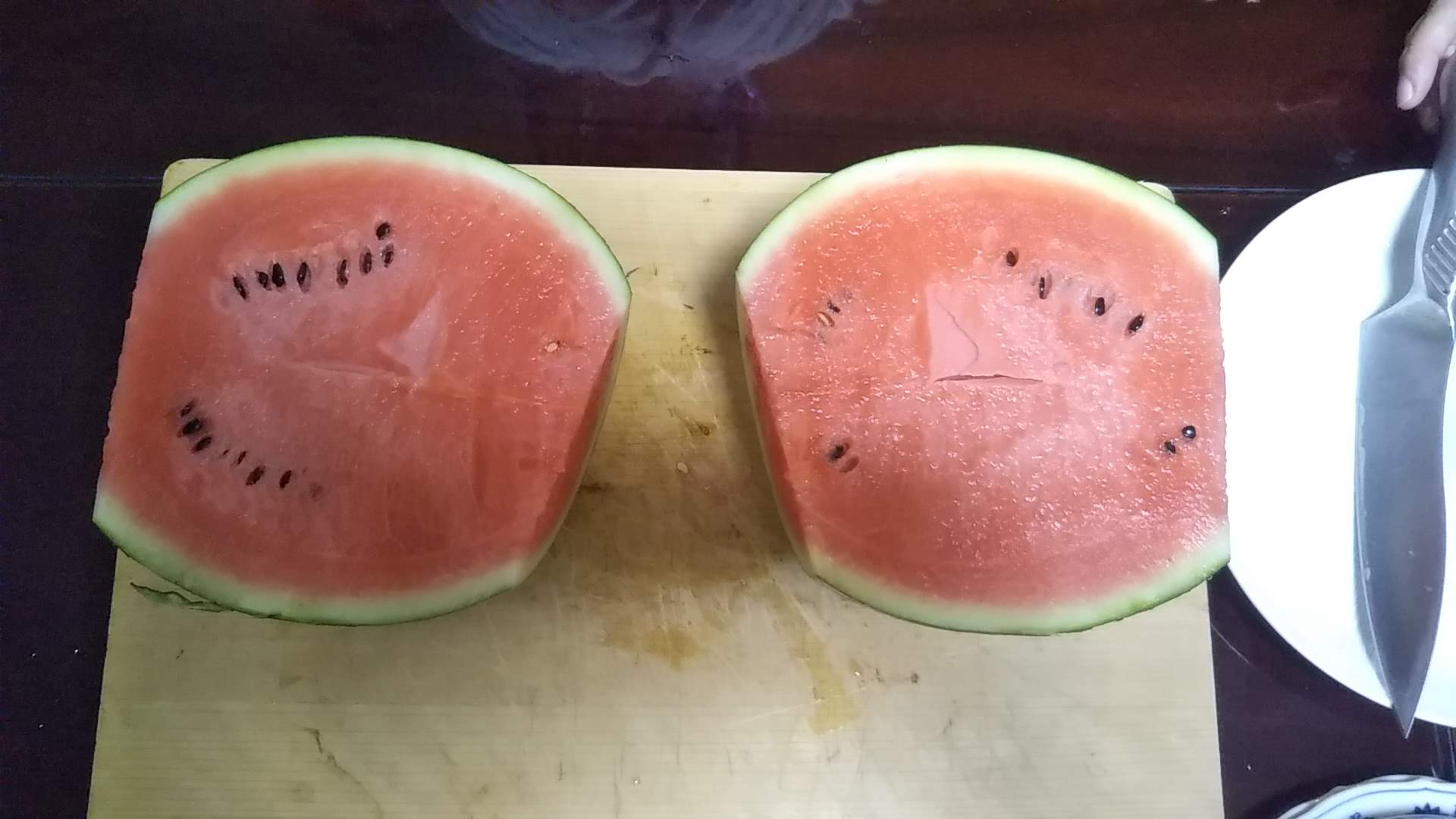
令和4年度の帰省(夏):スイカ収穫 日付: 8月 01, 2022 リンクを取得 Facebook × Pinterest メール 他のアプリ 今年、妻の両親が栽培したスイカは大成功!空中栽培はフレームを立てるため、初期費用がかかりますが、地面からの土の汚れや昆虫の被害を予防することが可能であるので、スイカ栽培のためにはおすすめですね。収穫したスイカはサイズもスーパーマーケットの商品より大きいでしたが、何よりもものすごく甘くてジューシーでした。スイカのカッティングは長女と次女が担当しました。最近、料理教室で学んだことをおじいちゃんとおばあちゃんに見せました。お疲れ様でした。感謝いたします。 コメント





コメント
コメントを投稿